
픽스호크 기반 드론 만드는 방법 레이싱 드론 만들기 세팅
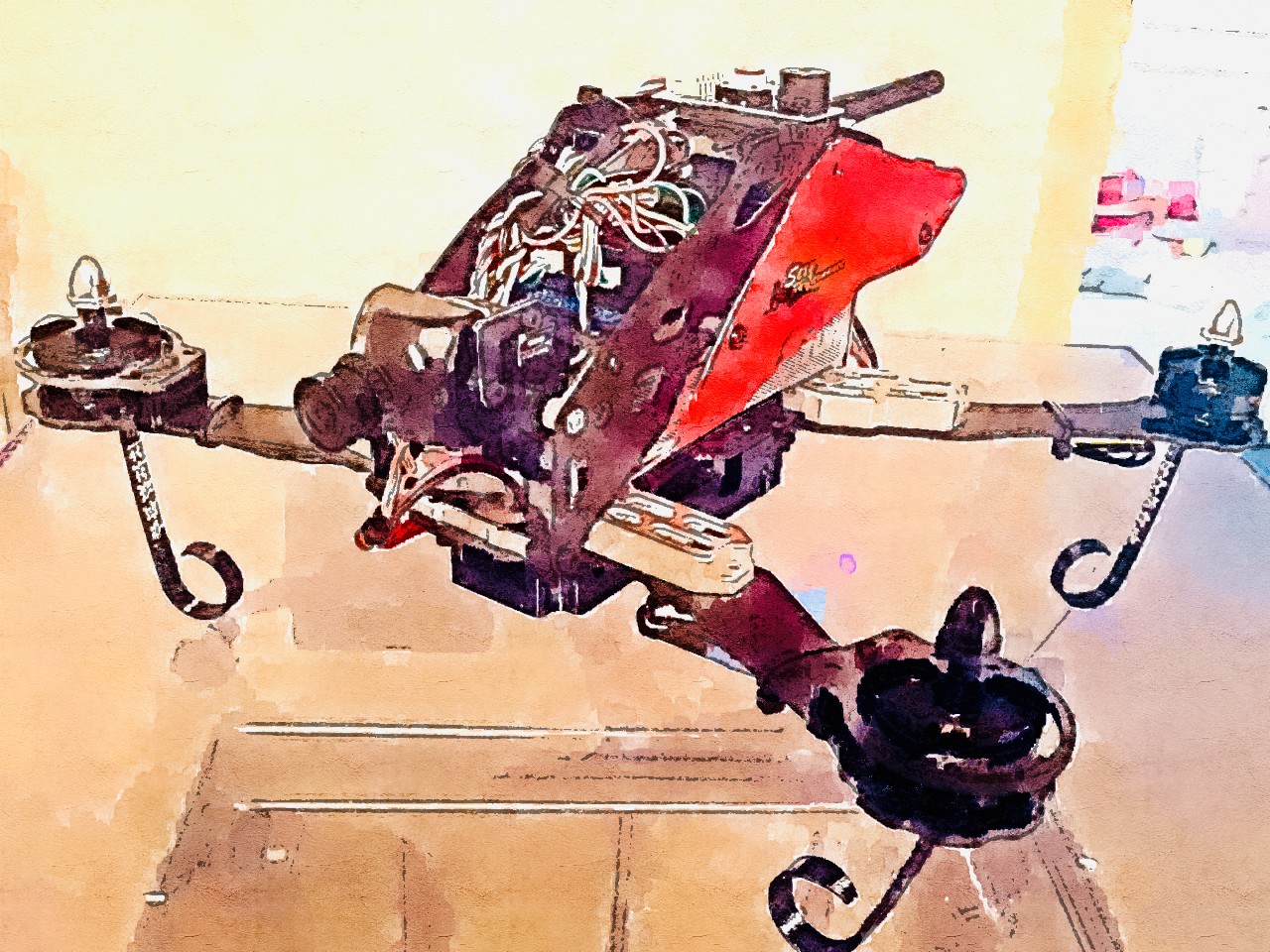
무선조종장치(RC device) 2021. 10. 7. 17:01 |픽스호크 플라이트 컨트롤러 기반으로 드론을 만들어 보았다.
픽스호크는 라디오링크사의 미니픽스를 구매
최신의 1.2버젼이라서 그런지 미션플래너나 Qgroundcontrol프로그램도 잘 먹히는 듯 하다.
굳이 라디오링크사의 펌웨어를 올릴 필요는 없다.
나는 큐그라운드컨트롤에서 펌웨어 미니픽스 4.01인가 그런 버젼이 보여서 그것을 스테이블 버전으로 올렸다.
저렴한 가격에 gps도 되고 pdb도 구성품으로 있으므로
상당히 편리하게 나왔지만...
필자는 프레임에 이미 파워 분배 보드가 있었으므로 있는것을 사용하기로 한다. 떼어내기도 귀찮.
그런데 여기서 한가지 실수를 한다.
원래 파워보드를 쓰면 배터리 전압을 알 수 있는 기능이 있는데
내가 내 레이싱드론용 보드를 쓰면서 이 기능을 못쓰게 된것이다.
그럼 수신기에서 이를 보완하면 되는데 생각을 못하고 다른 제품을 구매해버려서...
결국 어쩔수 없다. 플라이트 타임을 어느정도 예상하면서 날리는 수 밖에...
어차피 주력 드론도 아닐것 같고 자주 날리지도 않을 것 같으니 뭐 그냥 넘어갈까.
하이텍 오로라9x 조종기에서 전압을 확인하기 위해서는 옵티마 수신기, 즉 spc 슬롯이 있는 것을 써야 한다.
여기에 수십볼트까지 되는 것 같은데 나는 어차피 리포 6셀까지만 쓸 것이기 때문에 큰 문제는 없겠다.
다음에는 옵티마 sl 수신기를 사야겠다. s-bus기능이 있어서 선도 정리되고 좋다.
두번째 난관은 Qgroundcontrol 이라는 지상 관제 프로그램인데
모든 켈리브레이션과 세팅을 했음에도 아밍이 안결려서 곤욕을 치렀다.
거의 두시간 헤맨듯. 아 내 시간!!!
주로 경고가 뜨는 것은 pre arming 에러인데 3d fix 에러, 세이프티 스위치 에러였다.
일단 세이프티 스위치 에러는 간단하게 해결.
내가 픽스호크에 따로 세이프티 스위치를 달았기 때문에 이 스위치를 약 2초간 누르면
빨간불이 점등되던것이 쭉 빨간불인 상태가 된다. 이 때 아밍 스위치를 켜면(아밍 키 할당이 안되었을때는 스로틀 스위치를 아래 우측이나 좌측으로 해본다) 시동이...되야하는데...3d fix에러 계속 발생.
이 문제의 원인은 gps기능을 세팅해놓았는데 gps가 안잡히는 실내에서 세팅을 하려고 하니 발생하는것인데
좀 정확하게는 세팅프로그램의 문제도 있는 것 같다.
주 원인은 지오펜스 geo fence기능의 설정에 있다.
지오펜스를 켰을 때 지피에스가 뜸에도 불구하고(야외까지 나가서 걸어봄) 시동이 안걸렸다.
또한 보조적인 원인으로 세이프티 체크에 모든 항목으로 되어 있는 부분이 있다.
아무튼 이 두부분을 마구마구 누르고 다시켜고 누르고 다시켜고...
아직도 정답이 뭔지는 모르겠지만 일단은 지오펜스기능을 끄고 세이프티 체크는 한두개 해제한 상태에서 마무리한다.
지오펜스 기능도 되면 좋을 것 같은데....왜 안되는 것일까~
다음에 야외에서 지피에스 잡힐 때 세팅을 한번 더 해봐야 할 것 같다.
조종기 세팅은 개별적이긴 한 부분이지만 내가 까먹을까봐 남겨보자면
A 스위치 (아밍) 온오프
H스위치 비프음
G스위치 리턴투홈
D스위치 플라이트모드(로이터, 스테빌라이즈, 포지션홀드)
오른쪽 조그 레버는 카메라 상하 제어
뭐 기록해 두면 세팅할 피시 없을 때 도움이 되겠지.
휴대폰이나 태블릿으로도 텔레메트리만 연결하면 되긴 하지만 텔레메트리 자체를 안가지고 있을수도 있으니까.
또 다른 실수할 수 있는 문제가 있는데
변속기 선은 미니픽스에 꼽을 때 순서가 중요하다
X캅터 기준 배선이다.
미니픽스 1채널 = 드론 변속기 우측 전방 변속기 선에 체결
미니픽스 2채널 = 드론 변속기 좌측 후방 변속기 선에 체결
미니픽스 3채널 = 드론 변속기 좌측 전방 변속기 선에 체결
미니픽스 4채널 = 드론 변속기 오측 후방 변속기 선에 체결
그리고 나서 정확히 결선되었는지 Qgroundcontrol 지상관제 프로그램을 통해 꼭 확인한다.
이는 vehicle setup 에서 motors항목에서 확인이 가능한데 프롭을 꼭 제거하고 실험한다.
ABCD모터를 하나씩 틀어보고 순서대로 돌아가는지 확인하면 되는데
순서대로가 어느 순서인지가 중요하겠지?
A모터를 동작시켰을 때 드론의 우측 전방
B모터를 동작시켰을 때 드론의 우측 후방
C모터를 동작시켰을 때 드론의 좌측 후방
D모터를 동작시켰을 때 드론의 좌측 전방
이 순서로 모터가 돌아야 하고 마지막으로는 프롭을 달고 손으로 잡고 시동을 켜보아서
제대로 드론이 균형을 유지하는지 확인해주면 좋다.
아....이번에도 꽤 방황의 시간을 보냈구나.
다음에는 헤메지 말아야지.
'무선조종장치(RC device)' 카테고리의 다른 글
| Pixhawk Here3 gps mount 3D design and print (0) | 2022.01.09 |
|---|---|
| 픽스호크 라디오링크 미니픽스 최종 후기 radiolink minifix review (0) | 2021.10.17 |
| Hitec maxima SL manual 사용설명 (0) | 2021.09.22 |
| RadioLink minipix pixhawk connection diagram 픽스호크 설치법 (0) | 2021.09.22 |
| 휴대폰을 통해 초고화질 롱레인지 드론 만드는 법 HDMI to NTSC 1부 (0) | 2021.06.08 |